Conclusion (for now)
Now that the relative algorithm is working it can be added with the EM algorithm to see if it still works.
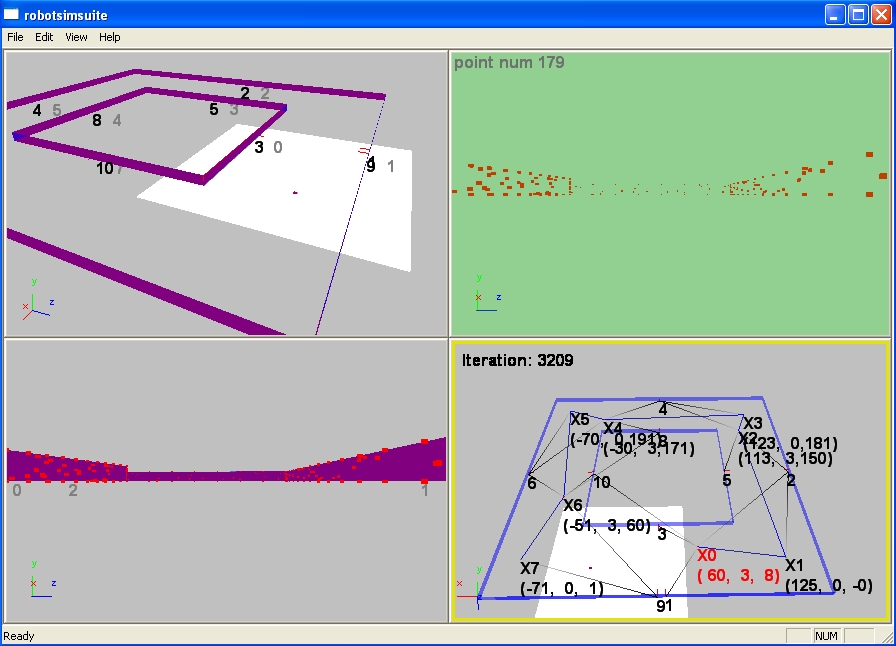
I created a new test suite since the last one didn't have good support for multiple rendering targets per window. This one can draw any combination of data on a single window (before EM, after EM, after Rlt Algorithm etc).
I tested both the motion model map and the muti-plane map and both mostly works as expected. This is not quite the terrible noise of an early EM but the relative algorithm would need a prefilter to deal with that much noise in terms of the plane size changing frequently (also not very realistic). There are a few issues I have only recently discovered that would perhaps improve things that I might look into later. Below are pictures and videos.
